
Что такое мягкие роботы, мы уже написали. В этой части рассказываем про те из них, которые вышли за пределы лаборатории и уже используются.
Доля на рынке
Хотя большая часть мягких роботов пока не покинула пределов лабораторий, некоторые из творений химика из Гарварда Джорджа Уайтсайдса уже вовсю используются для различных производственных нужд.
Для использования традиционных роботов с захватным устройством требуется точная информация о местонахождении объекта, его форме, весе и скользкости, так как необходимо рассчитывать траекторию движения каждого из шарниров. Одна система может быть настроена для манипуляций с флаконами для шампуня, другая — с детскими игрушками, а третья — для работы с футболками. При этом, когда производитель обновляет сборочные линии, или растет количество товаров, хранящихся на складе интернет-магазина, эти компании вынуждены заменять используемых роботов и обновлять программные алгоритмы для каждой области применения — чаще всего путем значительных денежных и временных затрат.
В свою очередь, роботы с захватным устройством, изготовленные из мягких и гибких материалов, могут сами подстраиваться под форму и размер других объектов. Стартап Soft Robotics, расположенный в Кембридже и появившийся благодаря исследованиям Уайтсайдса в 2013 году, привлек около 4,5 миллионов долларов на разработку серии роботизированных клещей с резиновым покрытием.
«Мы не используем датчики измерения силы, системы обратной связи и не проводим сложные расчеты, — рассказывает глава компании Карл Воз. — Мы просто берем объект и сжимаем захват, пока он не станет достаточно крепким».
Клещи, полностью изготовленные из полимеров, сгибаются, когда во внутренние каналы накачивается воздух. В то время как роботы с обычными манипуляторами должны рассчитывать положение каждого пальца, мягкая поверхность робота нового поколения позволяет ему усиливать захват и деформироваться в соответствии с формой объекта. Робот даже может переносить грибы, ягоды клубники или зрелые томаты с куста — задачи, которые до сих пор ассоциировались лишь с деликатным ручным трудом.
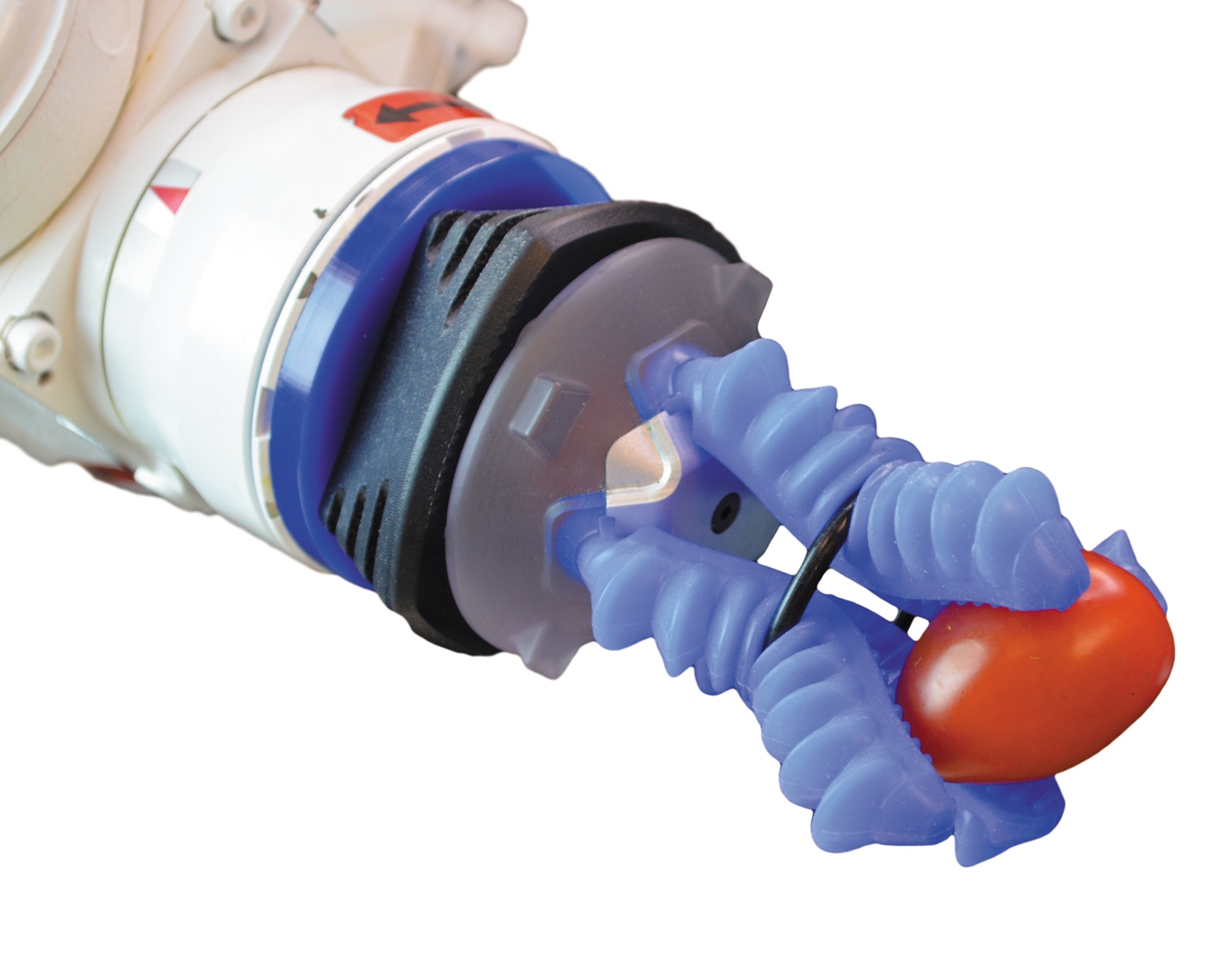
Soft Robotics выпустила первую серию таких роботов в продажу в июне 2015 года, и сейчас они проходят испытательный срок в шести компаниях, работающих в сфере упаковки и сортировки продуктов питания.
В соседнем Бостоне компания Empire Robotics выбрала принципиально иной подход, представив роботизированную «руку», которая напоминает мягкий мяч для снятия стресса. Мяч наполнен частицами, похожими на песок, которые изначально могут свободно перемещаться, что позволяет роботу деформироваться и принимать форму объекта. Затем с помощью специального клапана выкачивается воздух, что делает материал внутри робота жестким и закрепляет захват.
Versaball, разработанный на основе исследований Хенрика Джагера из Чикагского университета и Хода Липсона из Университета Корнелл, способен поднимать объекты весом до девяти килограммов за десятую долю секунды.
Ощущение пространства
По мере того, как появляются все новые роботизированные осьминоги, гусеницы, морские звезды и другие пластичные устройства, некоторые ученые сосредотачивают свою деятельность на разработке новых способов управления действиями роботов.
«Мы говорим о пластичных, эластичных материалах, — говорит Креймер. — Когда одна часть устройства приходит в движение, не всегда можно точно предугадать, где окажется другая».
Вот почему для многих областей понадобится применение дополнительных датчиков контроля движения. Между тем, стандартные датчики положения и силы — жесткие или полужесткие электронные компоненты — не всегда подходят для установки на мягких роботах, которые способны менять форму в довольно широких пределах.
Некоторые инженеры пытаются решить эту проблему путем разработки гибких датчиков. В Университете Карнеги Меллон в Пенсильвании Йонг-Лэ Парк работает над созданием клейких элементов, которые содержат жидкометаллические интегральные схемы, заключенные между пластинками из силиконового каучука. Эти жидкие схемы, находясь в различных конфигурациях, будь то спирали или полосы, могут передавать информацию о том, сжимается или растягивается устройство и в каком направлении.
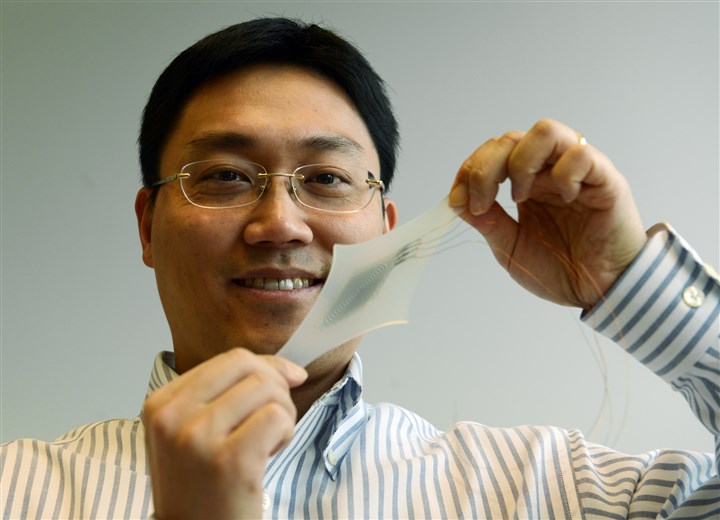
Йонг-Лэ парк показывает гибкий датчик. Фото: Билл Уэйд/Post-Gazette.
«Гибкие датчики могут быть так же чувствительны, как кожа, в зависимости от того, как вы их запрограммируете. Можно их настроить на касание пальца или на вес в 13 килограммов», — поясняет инженер Роберт Шеферд в Корнелле, разработавший технологию 3D-печати чувствительных к растяжению покрытий, которые наносятся прямо на корпус робота. Дополнительные слои проводящих или диэлектрических материалов формируют электрический импульс при давлении или натяжении.
Гибкие датчики могут найти применение в носимой робототехнике. При поддержке Министерства обороны США Конор Уолш из Гарварда разработал мягкий «экзокостюм» — более комфортный аналог экзоскелета из фильма «Железный человек», который бы позволил солдатам переносить тяжелые грузы на значительные расстояния. По словам Уолша, испытатели все еще чувствуют, что костюм помогает им двигаться, но ходить в них «вполне естественно», что является положительным отличием от традиционных экзоскелетов. Вместо громоздких, жестких панелей, в костюмах Уолша используются ремни из нейлона, полиэстера и спандекса, расположенные в специальных точках вдоль ног. Информация с датчиков помогает отслеживать походку пользователя и помочь в нужный момент. Следующим шагом, рассказывает Уолш, станет внедрение гибких датчиков для повышения комфорта.

Экзокостюм. Фото: Wyss Institute, Harvard University.
Тем временем Ребекка Крамер, инженер из университета Пердью в Индиане, разработала роботизированную ткань, которая двигается под воздействием электрического тока. Полотно, в которое вшиты спирали с эффектом запоминания формы, может менять свою длину на 60% при стимуляции. «Умные нити» отслеживают движение ткани: Крамер использует чувствительные к растягиванию силиконовые вставки с жидким металлом.
Данную идею можно было бы использовать для изготовления рукавов или манжет, которые могли бы помочь травмированным или пожилым людям при движении. Кроме того, Крамер считает, что такой материал можно использовать для сборки роботов в космосе. Астронавтам достаточно было бы просто обернуть ткань, скажем, вокруг куска вспененного материала, и из этого получится функциональный робот.
Команда Ребекки Крамер. Фото: Чарльз Чичке.
Но прежде чем отправлять мягких роботов в космос, предстоит еще большой объем подготовительной работы на Земле. Сравнительно немного известно о том, как активные материалы деформируются под воздействием внешних сил, а также как движение распространяется через мягкие материалы. Кроме того, большинство мягких роботов функционируют только при наличии традиционного источника энергии, к примеру, батарей или бака со сжатым воздухом. Некоторые ученые уже рассматривают возможность применения биохимических или возобновляемых источников энергии для работы мягких роботов.
Чемпионат роботов в рамках Soft Robotics Week 2016, который пройдет в апреле, может стимулировать развитие исследований. Роботы будут проверять свои возможности в разных дисциплинах: им придется соревноваться в гонках по песку, открывать дверь за ручку, взять несколько незнакомых объектов и уворачиваться от хрупких объектов под водой. По словам инженера Сесилии Ласки, цель мероприятия — показать, что мягким роботам под силу выполнять некоторые задачи, с которыми справляются обычные роботы, а также другие задачи, которые обычным роботам неподвластны.
«Мне не кажется, что мягкие роботы заменят собой традиционных. Скорее всего, мы увидим, как они станут работать сообща», — считает Ласки.
Многие ученые полагают, что роботы с жесткими корпусами сохранят свое превосходство там, где требуется большая мощь, скорость или точность. Но во все растущем числе областей, в том числе при близком взаимодействии с людьми или в других непредвиденных ситуациях, свое применение найдут и мягкие роботы.
В Королевском колледже в Лондоне, например, коллеги Ласки конструируют хирургический эндоскоп на основе разработанной ею технологии создания щупальца. Команда Ласки в Италии разрабатывает полноразмерного робота-осьминога, который плавает с помощью реактивного движения и когда-нибудь будет использован для изучения подводного мира. Прототип уже способен понемногу передвигаться в резервуаре в лаборатории так же, как это делают настоящие осьминоги.
«Когда я начинала разработку осьминога, люди спрашивали меня, зачем я это делаю, — рассказывает Ласки. — Я отвечала им: “Не знаю, но если у меня получится, его можно будет использовать в огромном количестве областей” ».
Читать первую часть: Мягкие и приятные на ощупь роботы будущего
Перевод: Алексей Зеньков.
Материалы по теме:
Мягкие и приятные на ощупь роботы будущего
8 роботов, которые уже работают среди людей
11 робо-стартапов, о которых нужно знать
Этот робот делает коктейль на основе ваших твитов
Секс с роботом скоро станет нормой
Этот робот собирает кубик Рубика за секунду
Робот-собутыльник: отныне вам не придется пить в одиночку
Видео по теме:
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Материалы по теме
- 1 Куда идти с идеей стартапа: кто поможет превратить её в действующий бизнес?
- 2 «Наша разработка должна сделать эндоскопию массовым обследованием». Как ИИ из Ярославля помогает распознавать рак на ранней стадии
- 3 Студенты хакнули «Газпром нефть» и «Сибур»
- 4 Программист, который умеет в data science, круче, чем дата-сайентист, который умеет в программирование
- 5 Мобильным приложениям нужен особый подход. 11 советов, как не убить маркетинг
ВОЗМОЖНОСТИ
24 апреля 2024
25 апреля 2024