
В 2007 году Сесилия Ласки попросила отца поймать живого осьминога для ее лаборатории в Ливорно, Италия. Отец подумал, что дочка сошла с ума: будучи рыболовом-любителем, он знал, что поймать осьминога крайне легко, а значит это очень глупое животное. И вообще, зачем ученому-робототехнику, который работает с металлом и микропроцессорами, могло пригодиться это скользкое головоногое?
Тем не менее, Ласки-старший поймал осьминога на побережье Тосканы и отдал дочери, работающей в Школе продвинутых исследований Св. Анны в Пизе. Сесилия и ее студенты поместили моллюска в резервуар с морской водой, через который можно было наблюдать за тем, как животное хватает кусочки анчоусов и крабов. После этого команда приступила к созданию роботов, которые могли бы повторить эти движения.
После постройки нескольких прототипов им удалось создать искусственное щупальце с пружинами и проводами внутри, способное в точности повторить сокращения мышц осьминога и в итоге совершать волнообразные движения, удлиняться, сжиматься и извиваться вполне похожим образом. «Это абсолютно новый подход к созданию роботов», — говорит Ласки.

Подобный подход стал одной из основных областей исследований в робототехнике последних десяти лет. Ученые и полевые инженеры долгое время взаимодействовали с роботами с жестким корпусом, форма которых часто копировала форму человека или животных с жестким скелетом.
Преимуществом таких устройств является их способность двигаться по математически рассчитываемой траектории, а жесткие конечности могут сгибаться и разгибаться только вокруг одних и тех же осей. Но для того чтобы такие роботы не врезались в препятствия, необходим тщательный расчет их движений и подробная обратная связь. И даже при этом их движения могут быть беспорядочными или даже опасными при взаимодействии с людьми, другими объектами, необычной окружающей средой или другими непривычными условиями.
Для роботов, при создании которых вдохновлялись формой осьминогов, гусениц или рыб, такой проблемы попросту не существует. Не требующие серьезных (и часто некорректных) вычислений, мягкие роботы изготавливаются из эластичных материалов и могут просто менять свою форму в соответствии с окружающей средой. Несмотря на то, что в конструкции некоторых из них используются пружины и провода для имитации движения мышц или сухожилий, как вид, мягкие роботы превосходят тех, что имеют жесткий каркас и что определяли собой предыдущие поколения роботов. Так как у них нет деталей наподобие костей или суставов, эти устройства могут растягиваться, скручиваться, сминаться и сжиматься так, как раньше роботы были не способны. Они могут менять свою форму и размер, обвиваться вокруг объектов и даже касаться людей более безопасно.
Где их можно использовать
Если технологии достаточно разовьются, такие роботы получат широкое распространение: в качестве спасателей они смогут проникать даже в самые узкие пространства в обломках; как домашний медицинский персонал — вплотную взаимодействовать с человеком; как станки на производстве — производить манипуляции с объектами без предварительной прошивки.
Есть ли у робо-осьминога «друзья»?
Исследователи уже создали большое количество разных роботов, среди которых роботизированная гусеница, рыба и искусственная медуза. 29-30 апреля в Ливорно пройдет первый в истории чемпионат, в котором примут участие десять команд-создателей мягких роботов. Ласки, которая занимает пост научного координатора исследовательского консорциума RoboSoft, спонсируемого Еврокомиссией, надеется, что это мероприятие форсирует появление новых разработок в отрасли.
«Если мы взглянем на биологию и зададимся вопросом, что открыла для нас дарвиновская теория эволюции, то мы увидим множество решений вопросов движения, ощущения, захвата, питания, охоты, плавания, ходьбы и скольжения, которые недоступны роботам с твердым корпусом, — считает химик Джордж Уайтсайдс, исследователь в Гарвардском университете. — Это просто потрясающая идея – создать принципиально новый класс роботов».
Плавные движения
Для того чтобы робот точно знал, как именно и в какой последовательности приводить в движение множество шарниров, требуются наличие соответствующей программной оболочки, тщательно контролируемые условия и постоянная обратная связь. Стандартные роботы могут не справиться с задачами, которые не соответствуют запрограммированным параметрам, а в нестандартных условиях окружающей среды они могут полностью выйти из строя. Чаще всего роботы размещают за ограждениями, чтобы защитить работников от непреднамеренного вреда.
Робот Versaball играет в бир-понг.
«Задумайтесь о том, как на самом деле сложно завязывать шнурки, — говорит Даниэла Рас, директор лаборатории информатики и искусственного интеллекта в Массачусетском технологическом институте. — Мы бы хотели, чтобы роботам стало это под силу».
За последнее десятилетие это стремление привело к повышенному интересу к разработке более легких и дешевых устройств, которые могли бы справляться с непредвиденными и нестандартными ситуациями, а также напрямую взаимодействовать с человеком. Некоторые робототехники, включая Ласки, считают, что мягкие материалы и заимствование решений у природы могли бы удовлетворить этот спрос.
Отношение к мягким роботам в научном сообществе
По словам Ласки, поначалу эта идея не вызвала интереса. «Сначала на традиционных конференциях по робототехнике не хотели принимать мои статьи, — говорит она. — Но сейчас по нашей тематике проводят отдельные научные сессии». Подогревают интерес к сфере и недавние достижения в создании полимеров: в частности, появление новых технологий литья, формовки и 3D-печати полимеров произвольной формы. Это позволило робототехникам более свободно экспериментировать с созданием мягких роботов.
В результате уже сейчас к объединению RoboSoft, созданному в 2013 году, присоединились 30 учреждений. В 2014 году запустили профильный журнал Soft Robotics и ресурс с открытым доступом Soft Robotics Toolkit. Он был создан учеными из дублинского Колледжа Тринити и Гарварда для упрощения обмена советами, схемами и другой информацией между исследователями и любителями.
При этом, как говорит Ребекка Крамер, инженер из университета Пердью в в Индиане, «я не считаю, что в сообществе сформировалось единое мнение о том, как должны выглядеть мягкие роботы, и мы все еще пробуем разные технологии».
Как работают роботы
Пожалуй, главным вопросом является то, как заставить тела роботов извиваться, скручиваться и растягиваться. Роботизированное щупальце разработки Ласки построено на основе тонких металлических кабелей и пружин, изготовленных из сплавов с эффектом запоминания формы — легко гнущихся металлов, которые возвращают первоначальную форму при нагреве. Некоторые из этих деталей проложены внутри щупальца и имитируют работу продольных мышц, которые позволяют конечности изменять длину или сгибаться. Другие элементы радиально выходят из сердцевины щупальца, имитируя поперечные мышцы, которые меняют его диаметр. Создатели могут заставить щупальце извиваться или даже обвиться вокруг руки человека с помощью внешних двигателей, прикрепленных к кабелям, или путем нагрева пружин с помощью электрического тока.
Подобную систему реализовал нейробиолог Барри Триммер в ходе создания мягкого робота в виде гусеницы его любимого вида — бражника (Manduca Sexta). В лаборатории Триммера в Университете Тафтса, Массачусетс, каждый день рождаются 20 особей бражника, а сам Триммер создает еще несколько роботизированных. Механизированные создания ползают по лабораторному столу практически так же, как настоящие, и они даже могут повторить фирменное движение гусеницы: подтянув «мышцы» с одной стороны и сократив с другой, гусеница резко сворачивается в круг и укатывается прочь.
Триммер, главный редактор журнала Soft Robotics, мечтает, что когда-нибудь столь богатый арсенал движений позволит этому роботу стать хорошим помощником для спасательных служб, ведь в случае катастроф он сможет проникать под груды обломков в поисках выживших.
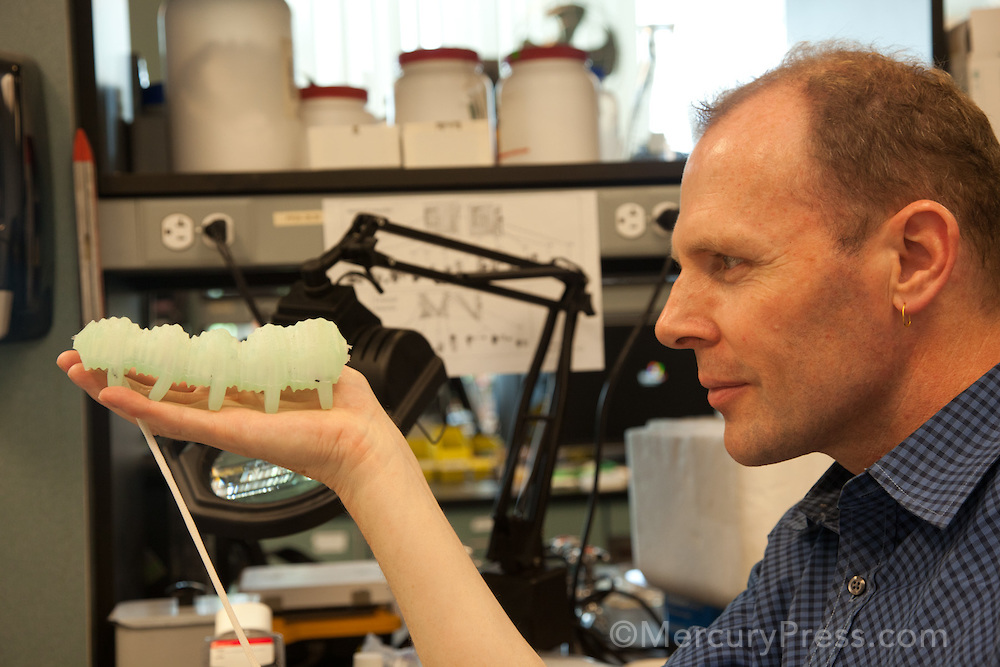
Тем временем Уайтсайдс работает над созданием роботов, приводимых в движение силой воздуха — например, семейство устройств на полимерной основе, прообразом которых стали морские звезды. Каждая из их конечностей состоит из развитой сети кармашков и каналов, которые проложены между двумя материалами с разной эластичностью. Исследователи накачивают воздух в ту или иную часть робота, а его конечности (ноги, пальцы, как угодно) асимметрично надуваются и сгибаются.
Команда под руководством Уайтсайдса уже даже построила робота, который может сыграть мелодию на пианино. Другой четырехногий робот, созданный этой командой, с легкостью преодолевает специальную полосу препятствий: при приближении к возвышению с проемом высотой всего в два сантиметра устройство протискивается в это отверстие, демонстрируя потенциал мягких роботов при пересечении поверхностей сложной конфигурации.
Продолжение: Как мягкие роботы захватывают рынок
Перевод: Алексей Зеньков.
Материалы по теме:
Как мягкие роботы захватывают рынок
8 роботов, которые уже работают среди людей
11 робо-стартапов, о которых нужно знать
Этот робот делает коктейль на основе ваших твитов
Секс с роботом скоро станет нормой
Этот робот собирает кубик Рубика за секунду
Только четверо ваших друзей на Facebook «настоящие»
Робот-собутыльник: отныне вам не придется пить в одиночку
Видео по теме:
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Материалы по теме
- 1 Куда идти с идеей стартапа: кто поможет превратить её в действующий бизнес?
- 2 «Наша разработка должна сделать эндоскопию массовым обследованием». Как ИИ из Ярославля помогает распознавать рак на ранней стадии
- 3 Студенты хакнули «Газпром нефть» и «Сибур»
- 4 Программист, который умеет в data science, круче, чем дата-сайентист, который умеет в программирование
- 5 Мобильным приложениям нужен особый подход. 11 советов, как не убить маркетинг
ВОЗМОЖНОСТИ
20 апреля 2024
21 апреля 2024
21 апреля 2024