
Эта технология позволит управлять роботизированной рукой силой разума

Существует уже несколько подходов, которые позволяют взаимодействовать с техникой при помощи мозга. Однако все они требуют хирургического вмешательства, как, например, нейрокомпьютерный интерфейс, подобный тому, что разрабатывает Neuralink Илона Маска. Сейчас исследователи предложили новое решение — управлять «третьей рукой» или даже экзоскелетом, используя частоты нейронных сигналов.
Статья об исследовании опубликована в журнале IEEE Spectrum.
Один из перспективных подходов, который позволит контролировать устройства разумом, заключается в установке мозгового имплантата или нейрокомпьютерного интерфейса (НКИ). Но, как пишут исследователи, это неидеальный вариант: НКИ требует хирургического вмешательства и не столь эффективен за пределами лаборатории.
Другой многообещающий прорыв в этой области основан на электромиографии (ЭМГ) — методе, позволяющем определять электрические сигналы, которые посылают сотни нейронов спинного мозга и получают скелетные мышцы. Чтобы преобразовать эти сигналы, исследователи создали тренировочный модуль.
- Он получает сигналы ЭМГ от человека, которые выполняет упражнения, вызывающие небольшие сокращения мышц.
- После он определяет, из каких импульсов двигательных нейронов (нервных клеток, которые передают сигналы, побуждающие мышцы двигаться) состоят сигналы ЭМГ.
- Затем он анализирует взаимосвязь между импульсами двигательных нейронов и сигналами ЭМГ, переводя ее в математическую форму.
Теперь модуль «знает», как считывать активность двигательных нейронов из новых сигналов ЭМГ, поступающих от того же человека. Он делает это в режиме реального времени, всего за несколько миллисекунд, что дает возможность контролировать робоконечность с помощью разума.
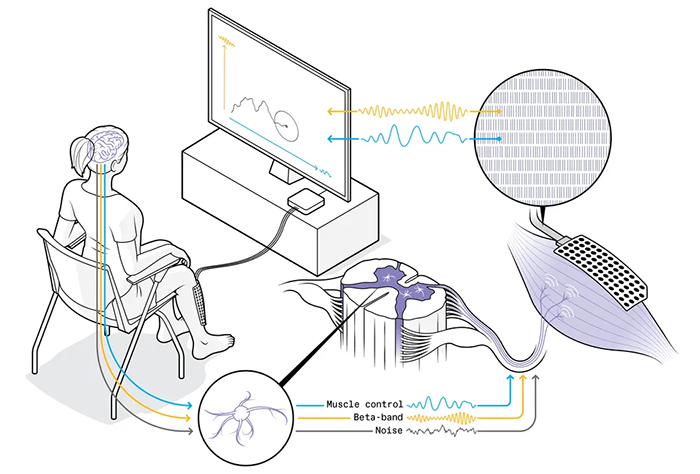
Фото в тексте: М. Брекляйн и др., Journal of Neural Engineering
Тем не менее это не означает, что мышцы больше не участвуют в процессе. Однако вскоре исследователи обнаружили, что более высокие частоты в двигательных нейронах, похоже, практически не используются. Оказалось, что за управление мышцами отвечают лишь более низкие частоты.
Поэтому в следующем эксперименте ученые разместили электроды на передней большеберцовой мышце голени человека, отвечающей за сокращение мышц стопы. Участников снова попросили выполнить упражнения. Затем исследователи разделили обнаруженные частоты на низкий и высокий диапазоны и сделали так, чтобы каждый из них отвечал за горизонтальное и вертикальное движения курсора.
Хотя участники точно не знали, как перемещать курсор по экрану в нужном направлении, они, по словам исследователей, «удивительно» быстро в этом разобрались.
«Мы были удивлены и взволнованы тем, как легко они сделали этот первый большой шаг к тому, чтобы найти канал нейронного управления, независимый от естественной двигательной активности», — сообщила команда.
Тем не менее предстоит еще много работы. Во-первых, движения курсора были не очень точными, поэтому будет непросто применить этот метод к более сложным роботизированным конечностям. К тому же неизвестно, способен ли наш мозг привыкнуть к такой технологии.
Фото на обложке: Denis---S /
Нашли опечатку? Выделите текст и нажмите Ctrl + Enter
Популярное
Налог на прибыль организаций
Материалы по теме
-
Пройти курс «Просто о сложном: первые шаги в бизнесe»

- 1 LG выпустила собственную модель искусственного интеллекта Exaone Deep Она обошла в вычислениях DeepSeek-R1 и o1-mini 20 марта 18:03
- 2 ИИ-стартап Илона Маска добавил в API генерацию изображений Модель grok-2-image-1212 генерирует картинки по $0,07 за штуку 20 марта 17:21
- 3 Исследователи назвали долю пользователей ИИ старше 55 лет А также как они используют нейросети 20 марта 16:17
- 4 Бизнес получит доступ к госданным для обучения ИИ На безвозмездной основе 13 февраля 12:54